双振动电机同步最优控制方法
发布时间:2020-11-05 点击量:641
在开始控制实验之前, 利用谐波扫描法辨识出 双振动电机的模型参数为, 电机1 折算到电机轴的 等效转动惯量为J1 = 01002 28 V / ( deg# s- 2 ), 等效 粘性阻尼系数为B 1 = 01156 39 V / ( deg# s- 1 ) ; 电 机2 的折算到电机轴的等效转动惯量为J 2 = 01001 683 V / ( deg# s- 2 ), 等效粘性阻尼系数为 B2 = 01159 06 V / ( deg# s- 1 )。振动电机的角位移由 增量式编码器测量。角速度通过对角位移的微分得 到(施加适当的低通滤波)。
实验在M atlab /Simulink /xPC Target的实时环境 下进行。Nat iona l Instruments的N I-PC I6601卡用于 编码器与电脑的连接。主从跟踪式PID 控制, 及最 优跟踪控制结果, 分别如图4, 图5所示。
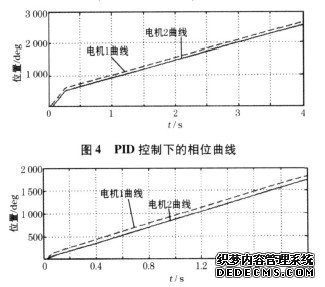
从上面2幅实验结果图可以看出, PID 控制下 的同步调整(包括转速和相位差的调整)时间较长, 约为013 s, 而最优控制下的调整时间约为0103 s。 实验证明, 最优控制的效果要比PID控制好得多。
另一个值得指出的问题是, 实验中测量角位移 时所采用的是增量式编码器, 连接到6601 编码器 输入卡时计数器在足够长的时间后会产生溢出, 从 而使控制崩溃。因此, 从工业应用的角度出发, 在 振动电机同步控制系统中不应使用上述测量方式, 而应当使用0~ 360 deg输出的角度传感器, 并且对 相位差z进行如下的变换, 以保证系统的稳定:
由表1可判断出泄漏电流和介绍损耗tgD分别 为146148, 013时的电缆状态测量点为孤立点, 因 为此点与自身聚类中心点的距离大于d。
通过算例可以看出, 在使用了本文所提出的梯 度聚类孤立点检测方法后, 可以很方便地检测出度 量有误的数据。联系电话13072684455(微信同步)